飞行是人类古老的梦想之一。一直以来,我们执着于观察动物世界中的构造。在仿生学习网络项目中,飞行同样是一个高频话题。多年以来,费斯托与高校、研究机构和研发企业合作,借鉴自然界的基本科学原理,打造了众多研究载体。
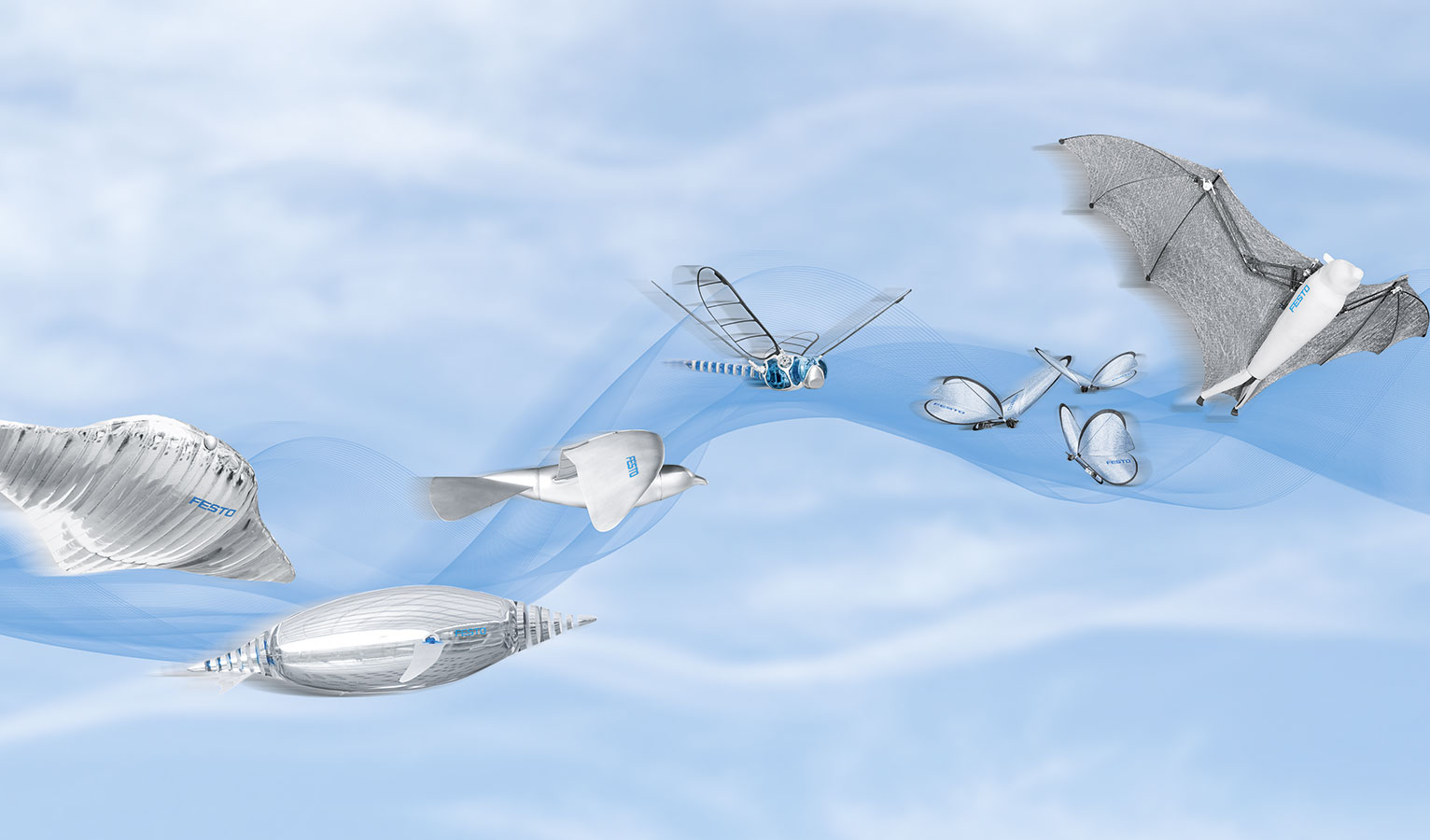
仿生学家们先是注意到了蝠鲼的胸鳍。蝠鲼虽生活在水中,但当它游动时,胸鳍却如同翅膀一般上下拍打。2007年,我们将这一原理应用于Air_ray 中。凭借Fin Ray Effect®轻巧的设计,氦气的浮力与拍打翅膀产生的驱动力,Air_ray能如同蝠鲼在水中游动一样在空气中移动。在仿生学理念的引导下,AirPengiuns 于2009年问世。AirPenguins的飞行技术与企鹅的游泳技术十分接近,通过被动扭转翅膀可产生正向与反向推动力
在此基础上,我们已经于2011年破解鸟类飞行的秘密,并推出SmartBird. 该仿生设计受银鸥生物体构造的启发,可自主完成启动、飞行与降落,无需外界驱动;其翅膀不仅可以上下拍打,还能向既定方向扭转。该设计中有一个活动的关节扭转驱动装置,可通过一系列复杂原理实现的驱动。
如果观察蜻蜓的世界,就会发现一种更复杂的飞行方式。蜻蜓的飞行技巧十分*:它们可延任意轨迹灵活飞行,可停留在空中,也可张开双翼滑翔。蜻蜓的两对翅膀活动时互不影响,使其可以突然停止或转向,在短时间内加速,甚至是向后飞行。通过BionicOpter, 费斯托生物团队于2013年在一架超轻型飞行物中对这些极其复杂的生物特性予以转化,将直升机、引擎飞机和滑翔机这三种飞机的飞行方式汇聚于一个机型。通过调节四个机翼各自的震动频率和转动角度可控制飞行的方向和力度,远程操控蜻蜓飞行器到达所在空间内的几乎各个角落。
2015年,费斯托通过eMotionButterflies完善了飞行器的轻量化和微型化。每只仿生蝴蝶的重量仅为32克。为使飞行器尽可能贴近自然样板,eMotionButterflies采用一种高度集成的机载电子设备。该设备可且独立地控制各个机翼,实现快速移动。空间中安装的十台摄像机识别仿生蝴蝶上的红外线标记,再由摄像机将位置信息传送至中央控制主机,从外部协调仿生蜻蜓的飞行。
 BionicFlyingFox:在飞行过程中,控制主机将人工仿生狐蝠与真实狐蝠的飞行轨迹进行对比,通过机器学习,不断优化仿生狐蝠的飞行效果。
BionicFlyingFox:在飞行过程中,控制主机将人工仿生狐蝠与真实狐蝠的飞行轨迹进行对比,通过机器学习,不断优化仿生狐蝠的飞行效果。
仿生学家们进一步开发该智能网络,于2018年汉诺威工业博览会上展出了可半自主飞行的BionicFlyingFox。半自主飞行通过机载电子设备与外部摄像机系统的组合实现,可使人工仿生蝙蝠以2.28米的翼展从空中飞过。人工仿生蝙蝠全身采用一种特殊研制的弹性气密材料,由弹性针织面料和选择性焊接的金属箔制成。蜂窝状的构造使得BionicFlyingFox可以在轻微损坏的情况下继续飞行。
大自然中生物的飞行方式各有千秋——要将这些技术投入到科技研发中,需要面临轻量化与功能整合两大挑战。而BionicFlyingFox将所有高载荷运动学中的关节点置于同一平面内,以便整个机翼呈剪刀状折叠。至此,费斯托成功解密了动物世界中的全部飞行方式。然而探索远没有结束。在大自然中,还有其他的现象,启发着仿生研究团队发现新的科技方案。


